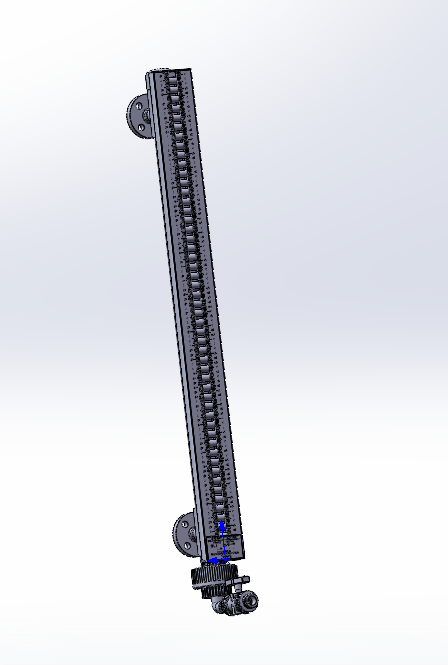
全向连杆结构腕关节III型





全向连杆结构腕关节是一种特殊设计的腕关节结构,旨在实现多方向的灵活运动。这种结构通常用于仿生机器人、假肢以及某些医疗设备中,以模拟人类腕关节的复杂运动。全向连杆结构腕关节的设计理念是通过多连杆系统来模拟人类腕关节的多方向运动。这种结构通常包括多个连杆和关节,每个连杆和关节都可以独立运动,从而实现多方向的灵活运动。这种设计可以提高机器人的灵活性和操作精度,使其更接近人类腕关节的运动能力。
标签:


- 模型大小 :5MB
- 消 耗 :400莫西点
- 下载次数 :
- 包含文件 :