设计机械化西装
浏览56次 大小5.17 MB
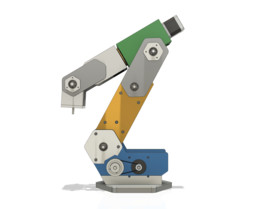
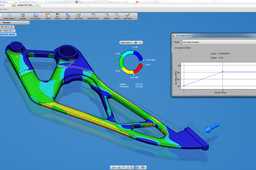
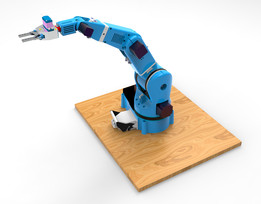
机器人夹持臂 重量:33.994公斤 位移:4.41毫米 压力:81.2173 N /(毫米* 2) 材料:钛Ti-6Al-4V
浏览72次 大小1.9 MB
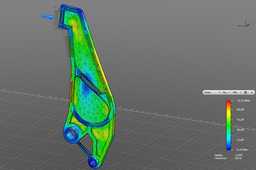
这是我们的34.6公斤的机器人手臂。我们在Autodesk SolidWorks和测试它。我们使用默认的网格设置
浏览49次 大小3.92 MB
机器人在CATIA V5
浏览57次 大小3.1 MB
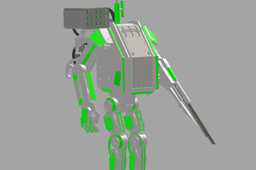
carcasse d联合国机器人suiveur de准则
浏览46次 大小2.22 MB
农业机器人
浏览59次 大小1 MB
我的第一个项目。 非常业余。
浏览60次 大小3.53 MB
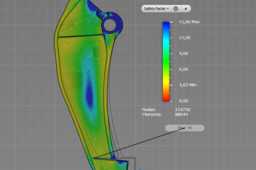
结果: 质量:33.049公斤 最大应力(冯错过):82.41 mpa 最大位移:1.676毫米 最大安全系数:3.01
浏览65次 大小7.41 MB
这是一个修订的初始模型降低它的质量一点…… 说实话我不会费心去减少初始模型从39.3公斤、38.4
浏览80次 大小15.56 MB
这是我了。 质量:23877公斤 ”丛书:3029分钟 位移:最大1558毫米钢铁ASTM A36
浏览48次 大小3.93 MB
CAD的项目,我从未完成了
浏览54次 大小1.17 MB
我开始了我的朋友在《科学》杂志上发行。我将欣赏技巧以使它更好。
浏览56次 大小1.71 MB
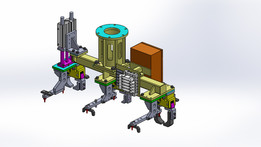
机器人工具捡verius箱子精密,并把它们安置在它们应该在的地方。
浏览34次 大小23.11 MB
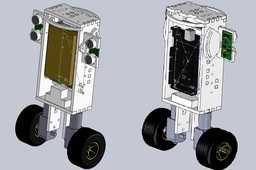
模型自平衡机器人,包括生产文件。 注意,第一个版本的汽车没有足够的果汁,看到迭代2号,最后我用25
浏览53次 大小26.71 MB
当你坐在桌子在办公室你需要一张纸。这是我的纸块夹。
浏览51次 大小9.28 MB
机械臂
浏览41次 大小3.84 MB
这种Moveo6轴机械臂的混音旨在简化和改进BNC3D公司的原始设计。还可以使零件更具三维打印效果友
浏览39次 大小275.82 MB
请给我一杯咖啡)请只捐5美元(如果你喜欢的话)https://www.paypal.me/roboticrus))))))这个学
浏览24次 大小137.12 MB
带伺服MG995的四自由度丙烯酸机械臂
浏览138次 大小11.61 MB
这是一个实验,使一个6自由度机械臂完全基于步进电机,并为更高的精度和保持扭矩皮带轮
浏览34次 大小122.96 MB
焊前焊后零件的机器人搬运
浏览24次 大小10 MB
请只给我5美元PayPal.Me/机器人罗斯基于直角坐标系机械手的仓库系统。根据材料、尺寸等物理特性
浏览23次 大小33.35 MB
Fanatec Clubsport公式碳轮圈。模型中没有内部细节,一些外部细节被简化了。所有尺寸均为近似值
浏览41次 大小11.17 MB
机器人机械手/夹持器/爪的概念
浏览34次 大小17.32 MB
我用3ds max完成的项目。您可以为项目发送消息文件。机器人手和手臂,如果你喜欢这个型号,别忘
浏览37次 大小44.72 MB
如何模拟机械臂| Solidworks运动动画-机器人手臂机器人手臂,动画6自由度(自由度)机器人,工业
浏览25次 大小56.69 MB
六轴机械臂模型
浏览50次 大小3.64 MB
https://www.kickstarter.com/projects/1383636492/the-minimum-servomotor-robotic-arm?语言=e
浏览33次 大小39.67 MB
豫ICP备13014461号-1 联系QQ:1102194243












![[组件]Dengan Akrilik的Lengan机器人4d的机械臂4DOF](https://static.3dmox.com/uploads/52/2020/202006131447336162.jpg)