我已经上传的文件,在catia V5 R20可以打开,模拟和视频文件。
浏览55次 大小6.08 MB
我在坚实的设计作品,呈现360年Photoview nd我要制造我就碎“五年规划”
浏览57次 大小3.67 MB
机器人的概念相扑比赛
浏览60次 大小8.9 MB
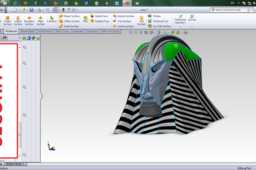
固体表面设计作品
浏览46次 大小2.62 MB
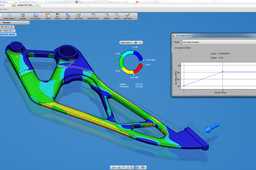
质量:82公斤 Max压力:78、85 MPa 安全系数:3.15
浏览48次 大小2.1 MB
运动的一部分,在我的机器人类
浏览44次 大小9.91 MB
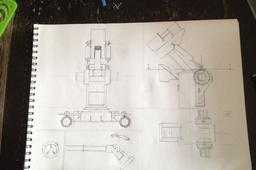
这是我第一次尝试机器人助手的铁人。在第一个 ,我画我的版本,就像一个蓝色印刷。下一个版本即将
浏览51次 大小85.54 MB
部分设计的无袖长衫使用简单的命令创建
浏览53次 大小12.29 MB
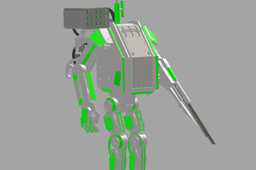
设计机械化西装
浏览56次 大小5.17 MB
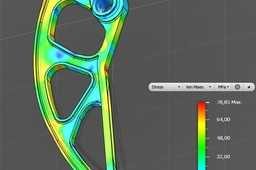
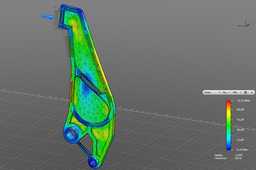
机器人夹持臂 重量:33.994公斤 位移:4.41毫米 压力:81.2173 N /(毫米* 2) 材料:钛Ti-6Al-4V
浏览72次 大小1.9 MB
这是我们的34.6公斤的机器人手臂。我们在Autodesk SolidWorks和测试它。我们使用默认的网格设置
浏览49次 大小3.92 MB
管理机器人手臂上的电缆 1为所有应用程序包,立即安装 集成留住春天 首选机器人应用程序与狭窄的
浏览67次 大小11.7 MB
M4A1
浏览471次 大小2.74 MB
机器人在CATIA V5
浏览57次 大小3.1 MB
SIMULACION多·德·德自由心证DE联合国狭长海湾ROBOTICO。 watch?v=tk_orN6a3MI
浏览84次 大小1.98 MB
carcasse d联合国机器人suiveur de准则
浏览46次 大小2.22 MB
农业机器人
浏览59次 大小1 MB
我的第一个项目。 非常业余。
浏览60次 大小3.53 MB
这个项目包含更多的物品,但这些不是我的设计。
浏览100次 大小未知
结果: 质量:33.049公斤 最大应力(冯错过):82.41 mpa 最大位移:1.676毫米 最大安全系数:3.01
浏览65次 大小7.41 MB
这是一个修订的初始模型降低它的质量一点…… 说实话我不会费心去减少初始模型从39.3公斤、38.4
浏览80次 大小15.56 MB
CAD的项目,我从未完成了
浏览54次 大小1.17 MB
我第一次CAD项目我的大学
浏览68次 大小4.4 MB
我开始了我的朋友在《科学》杂志上发行。我将欣赏技巧以使它更好。
浏览56次 大小1.71 MB
这是我第一次尝试这个挑战。
浏览60次 大小2.6 MB
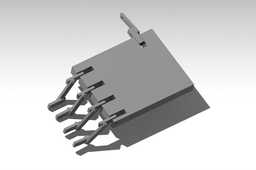
机器人工具捡verius箱子精密,并把它们安置在它们应该在的地方。
浏览34次 大小23.11 MB
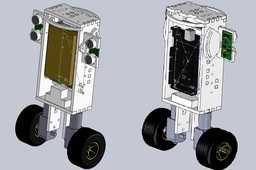
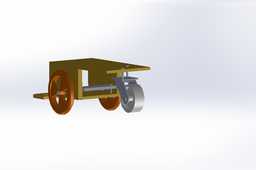
模型自平衡机器人,包括生产文件。 注意,第一个版本的汽车没有足够的果汁,看到迭代2号,最后我用25
浏览53次 大小26.71 MB
当你坐在桌子在办公室你需要一张纸。这是我的纸块夹。
浏览51次 大小9.28 MB
豫ICP备13014461号-1 联系QQ:1102194243