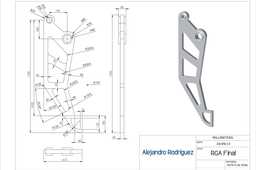
********************************************* 结果: 大体积 = 55.7 公斤 最大值。应力 (Von
浏览67次 大小1.9 MB

设计和演奏的最佳机器人学中: http://bestinc.org/ 银禧最好的一部分: http://www.jubileebest
浏览62次 大小119.35 MB
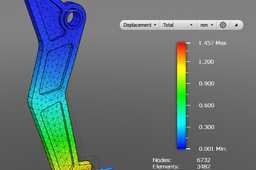
********************************************************** 结果: 大体积 = 60.17 公斤 最大
浏览63次 大小1.6 MB

在 ritardo 中领教伟思...... Grazie Flaviano 克雷斯皮每拉流程。 Flaviano 克雷斯皮 只见它晚
浏览61次 大小7.37 MB