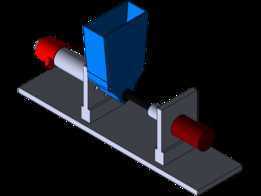
FRC 4607 C.I.S.2019机器人投球。这款机器人旨在完成2018年FRC游戏“Power Up”。该机器人是苏必
浏览11次 大小未知
这是一种自行设计和印刷的四足动物。代码也是自己编写的。显示文件是一个步骤文件。其他文件为so
浏览3次 大小未知
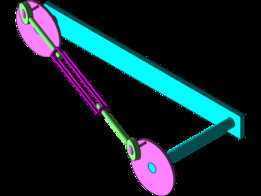
两轮自平衡机器人的底盘。机器人设计报告中列出了采购零件。控制器设计报告中列出了尝试的控制器
浏览7次 大小未知
对于我的极限重新设计想法,我想创造一种腕带,在使用电脑鼠标时可以支撑手腕并防止受伤。我的想
浏览17次 大小未知
房子里的空间
浏览4次 大小未知
嗨,伙计们!这是在SolidWorks中创建的挤出机模型。?我需要立即将此文件转换为“stp”。请任何人
浏览16次 大小未知
可在https://linktr.ee/ForsetiSolucoesPlaca在60°40X40的水平面上,放置2.65mm的铝板,以进行
浏览12次 大小未知
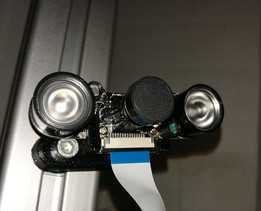
停止使用schwenkarm。Kamera h?lt ohne schraubenArml?nge 40mm支架,带旋转臂。无螺丝相机支架
浏览9次 大小未知
用这种钩子抓住一切,易于构建,非常有用
浏览8次 大小未知
Armata prawos?awna
印刷标志的不同方式
浏览6次 大小未知
这是我的JBL Charge 4蓝牙扬声器的NinjaFlex 3D打印手柄。无支撑和木筏的FlashForge Dreamer上印
作为一名女跑步者,很难找到一种很好的自卫手段。例如,胡椒喷雾是一种很好的防御手段,但只有当
糖果分配器允许您将糖果添加到三个料斗中,然后通过旋转中心指轮,齿轮不仅使料斗围绕中心柱旋转
浏览5次 大小未知
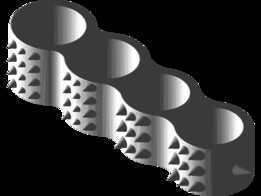
高扭矩(7:1)3D打印柔性执行器。灵感来源于。。。。学分:Skyntefichttps://youtu.be/BRIG5zAij
浏览10次 大小未知
可在https://linktr.ee/ForsetiSolucoesPlaca在45°40X40的垂直方向上,使用2.65mm的铝板进行电
我通过进口零件并制作配件将零件锁定到位来制作这个零件
为快速部署而设计的通用机柜只需使用相关PCB变量编辑DIMENSIONS文件并重建SOLIDWORKS部件。Adafr
有动态视频
舒适的椅子,适合要求苛刻的贝斯手
类似迷你伺服
该项目适用于那些需要将纱线纺成紧密网眼的球,以便纱线可以整齐地储存或使用的人。有廉价的手动
浏览22次 大小未知
我的有趣项目——2.4GHz遥控船,可以拍摄水,可以选择5.8GHz摄像头进行实时视频。我基于Arduino
浏览13次 大小未知
可在https://linktr.ee/ForsetiSolucoesPlaca在45°20X20的条件下,在2.65mm的范围内,对铝进行
在1498年至1500年间,达发明了滚珠轴承。他设计它是为了降低两个板之间的摩擦,这两个板在他另一
为大学项目设计的机器人手臂
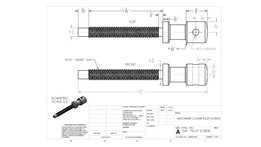
电动螺丝刀表面建模
工作正在进行中。压缩包是有效的,坚持电动化。我已经分享了这些文件,以便更好的头脑想出办法
豫ICP备13014461号-1 联系QQ:1102194243