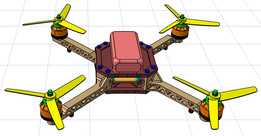
本项目展示了一个简化的四旋翼飞行器三维CAD模型,完全使用CATIA设计和组装。该模型包含所有主要
浏览8次 大小未知
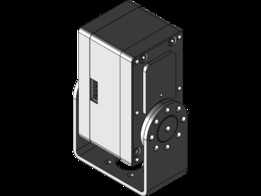
带夹具的 FeeTech SM60CL 伺服电机
浏览4次 大小未知
robot suiveur de linge
浏览3次 大小未知
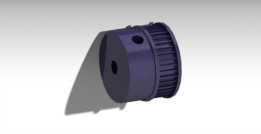
所需轴径:6毫米。轮毂直径:37毫米
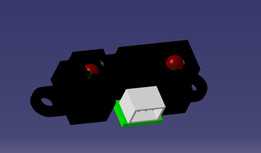
3D 传感器模型夏普
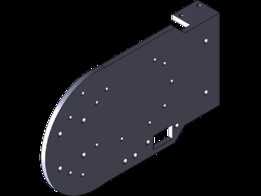
我展示的物体具有易于制造的优点。该物体由钢制成,以便能够被磁性夹爪抓
设计
我的第一次尝试
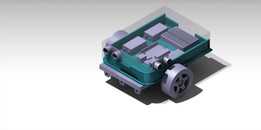
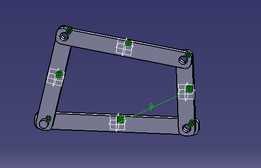
机器人小车底盘
这是Eucubot团队(代表Ense3)将用于2018年法国机器人杯的首个机器人原型。法国机器人杯是欧洲机
浏览6次 大小未知
在这个项目中,我设计了一种用于机械臂的活塞式夹爪机构。
浏览5次 大小未知
伺服电机 DYS GS 5515DMG
模型 3d Catià del 伺服电机 Alturn Usa ARS-3216HTG HV
采用生成式形状设计的无人机基地
我制作了 [@Taheri abdo] 于 2016 年上传的项目。为了创建多边形,我使用了不同的技术,并且为了
浏览7次 大小未知
本项目使用 CATIA 制作。在 Pro-E 中,我们通常只使用关系或公式来创建这类设计。但本项目完全使
三旋翼飞行器完整组装
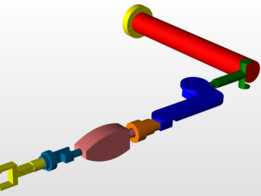
在这个项目中,我设计了一个传送系统
它包括自主机器人各个部件的组装,并简要介绍了DMU的运动学......................
?? 欢迎使用 FarmMach Pro! ???? 订阅频道:https://www.youtube.com/@farmmachpro?? Grabby 设
脚轮 65 毫米
这是Eucubot团队(代表Ense3)为法国机器人杯(Eurobot杯法国赛区,参见http://www.eurobot.org/
Mid-360 是 Livox 最新一代低速机器人激光雷达。
cu教程
30X15 铝型材 Catia 文件
遥控坦克原型
浏览9次 大小未知
本学期项目仅概念设计阶段,目标是让机器人向四个容量为300毫升的烧杯中注水。仍在完善最终设计
将运动的一般旋转装配到点上的空间自动轨迹上。使用 CATIA 的后缀将文件 txt 和 catvb 中的修改
豫ICP备13014461号-1 联系QQ:1102194243