眼睛玻璃站 第一次使用CATIA
浏览51次 大小13.99 MB
这是我之前的升级模式。我设法把体重降到20公斤的安全系数还是3,02。 材料:钢ASTM A36 质量:1999
浏览44次 大小2.17 MB
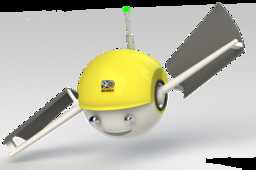
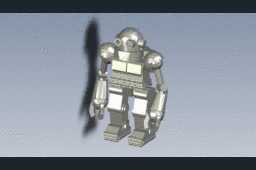
人形机器人名叫精明...............伟大的呈现试试https://sellfy.com/p/2E6q/
浏览61次 大小34.69 MB
重量优化
浏览45次 大小1.36 MB
这是简单的一件武器机器人ROBOWAR但是非常昂贵的制造。 重量可以保持每个武器的厚度。 4 - 5公斤
浏览63次 大小234.66 KB
设计:Taqi亚丁湾艾哈迈德·阿卜杜拉Alshameri 电子邮件:taqiaden@gmail.com 也门萨那,a t:967735
浏览64次 大小2.69 MB
机器人MakerBot大赛# 3
浏览47次 大小17.98 MB
机器人MakerBot大赛# 2
浏览46次 大小432.15 KB
————————————————————————————————————————————
浏览56次 大小9.25 MB
机器人MakerBot大赛# 1
浏览49次 大小1.5 MB
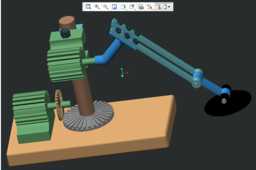
伺服机构
浏览57次 大小30.71 MB
机器人与其他模型由罗伯特·人重新创建。他唯一的呈现。..... 时间的流逝:):):)
浏览62次 大小15.47 MB
夺人眼球的灵感来自猫头鹰。
浏览39次 大小7.44 MB
使用旋转,挤压
浏览44次 大小17.9 MB
这是字面上的第一件事我曾经使用三维设计软件。3 d打印机只是捐赠给学校我教我设计这个测试打印
浏览60次 大小1.18 MB
SolidWorks(部分)已经上传。
浏览63次 大小5.8 MB
???????????????????????????????? ??????????????????????? ????????????????? 机器人设计与CAT
浏览57次 大小18.47 MB
PACERR机器人底盘。更多信息访问项目页面:code.google.com/p/pacerr 注意:射流的多个文件和副本
浏览50次 大小12.57 MB
da可以选择
浏览53次 大小94.22 KB
机器人馈线马口铁包装行业。 开发自动化旧印刷机没有支线
浏览65次 大小427.15 KB
这从给定的图纸设计包含特性更现实的功能。它可以站在自己的大踏板和一条狭窄的身体和有压花标志
浏览42次 大小16.29 MB
设计机械化西装
浏览56次 大小5.17 MB
机器人夹持臂 重量:33.994公斤 位移:4.41毫米 压力:81.2173 N /(毫米* 2) 材料:钛Ti-6Al-4V
浏览72次 大小1.9 MB
农业机器人
浏览59次 大小1 MB
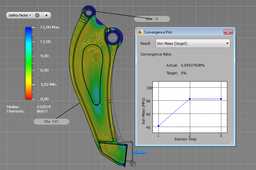
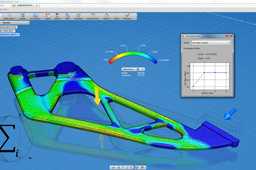
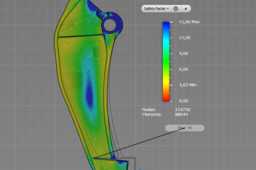
结果: 质量:33.049公斤 最大应力(冯错过):82.41 mpa 最大位移:1.676毫米 最大安全系数:3.01
浏览65次 大小7.41 MB
这是我了。 质量:23877公斤 ”丛书:3029分钟 位移:最大1558毫米钢铁ASTM A36
浏览48次 大小3.93 MB
CAD的项目,我从未完成了
浏览54次 大小1.17 MB
当你坐在桌子在办公室你需要一张纸。这是我的纸块夹。
浏览51次 大小9.28 MB
豫ICP备13014461号-1 联系QQ:1102194243