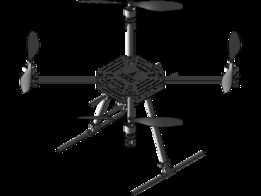
一种反向旋转电机的模型,AEORC。https://www.aeorc.com/products/contra-rotating-coaxial-doub
下载9次 模型2.64 MB

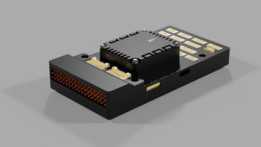
PIXHAWK 6C Mini的模型已使用以下尺寸和描述创建:https://docs.holybro.com/autopilot/pixhawk-
下载29次 模型14.11 MB
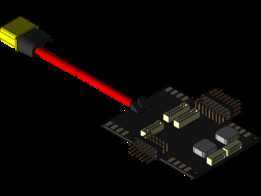
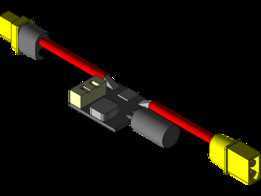
Holybro公司的配电板。https://holybro.com/collections/power-modules-pdbs/products/power-dis
下载9次 模型469.86 KB