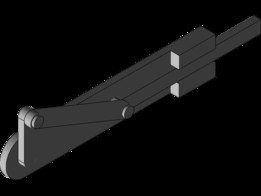
用于UR 10通用机器人的传感器支架,带有Robotiq 140夹持器。它允许你在夹持器旁边安装不同的传感
浏览11次 大小4.24 MB
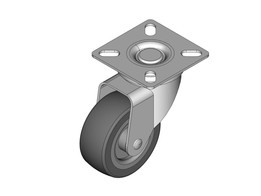
50毫米脚轮。购买fromhttps://www.amazon.de/gp/product/B073175YM6/ref=ppx_yo_dt_b_asin_title
浏览11次 大小551.01 KB

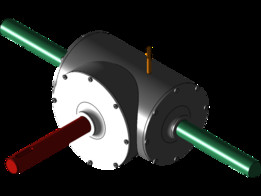
Festigkeitsnachweis für eine Passfeder nach Methode C(罗洛夫/马特克)
浏览10次 大小1.81 MB

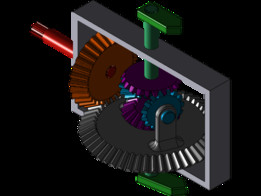
正齿轮差速器-自上而下动画:https://youtu.be/Wsff7VqSPRQASSEMBLY:https://youtu.be/65kgBpfH4
浏览8次 大小16.97 MB