Rodamiento para incluir en ejes de manera rápida para probar mecanismos antes de a?adir u
浏览5次 大小未知

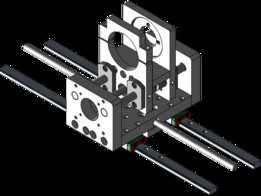
模型: Nema 17 40 mm 5.18:1 行星齿轮箱https://s.click.aliexpress.com/e/_DC7HWIZ最新3D模
浏览12次 大小未知

Nema 17 步进电机: 28, 34, 40, 48, 60 毫米https://s.click.aliexpress.com/e/_DdP98rj最
浏览18次 大小未知

ZHUGI 遥控汽车减震器铝合金 112MM adalah peredam kejut(减震器)berbahan aluminium yang dir
浏览7次 大小未知