ABB_IRB_6640
浏览5次 大小未知
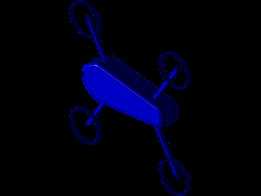
这是一个在 PTC Creo 中设计的简单四轴飞行器 3D 模型,然后导出到 SolidWorks,在 Simscape 中
浏览3次 大小未知
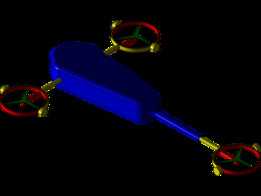
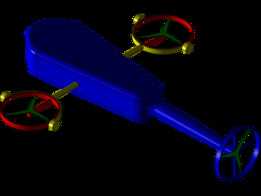
这是一个简单的2自由度倾转旋翼三旋翼无人机3D模型,使用PTC Creo设计,然后导出到SolidWorks,
浏览4次 大小未知
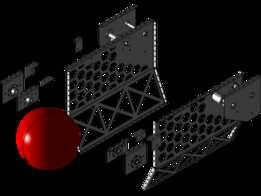
1/2 链节的链条组件
浏览6次 大小未知
这是为2022年比赛设计的FRC 8724号机器人
máy phan loai trái cay
将这些滑入80/20通道之间,以稳定您的80/20发夹。兼容25-25通道。由FTC团队#8808“马尾辫帮”制
ABB_IRB_7600
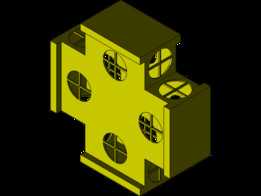
非完整模型,电路板PCB模块模型部分未添加。
库卡KR_300_R2700-2_V02
伺服电机 ES9251 II
半挂车空气罐
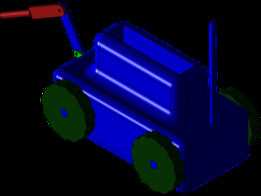
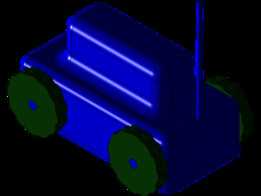
这是一个简单的四轮差速移动机器人,带有机械臂,其三维模型在 PTC Creo 中设计,然后导出到 Sol
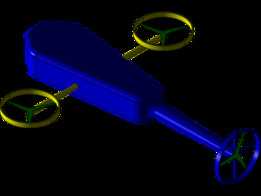
这是一个简单的2自由度双旋翼无人机,采用倾转旋翼,3D模型在PTC Creo中设计,然后导出到SolidWo
这是一个新型配置无人机的三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,并在 Simscape
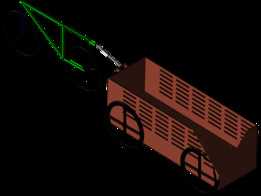
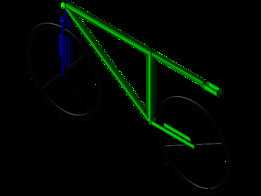
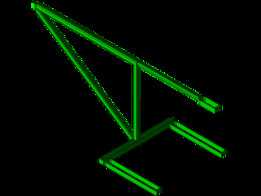
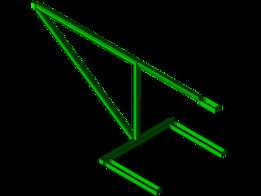
这是一个简单的带拖车的自行车移动机器人三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks
NTD
设计就是制作模型原型,观察其实际外观。这个模型主要是为小型机器人设计的。它连接了各种部件,
浏览7次 大小未知
这是一个简单的双旋翼无人机,带有后置螺旋桨,其三维模型在 PTC Creo 中设计,然后导出到 Solid
这是一个简单的四轮差速移动机器人三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,并在
13英寸轮用于IGV
这是一个简单的自行车移动机器人三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,再导入
这是一个简单的带拖车的三轮移动机器人三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,
这是一个简单的三轮移动机器人三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,再导入 Si
这是一个简单的笛卡尔坐标工业机器人三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,并
这是一个简单的双轮差速移动机器人,带有万向轮,其三维模型在 PTC Creo 中设计,然后导出到 Sol
浏览9次 大小未知
除了机器人之外的一切
这是一个简单的同轴三旋翼无人机三维模型,使用 PTC Creo 设计,然后导出到 SolidWorks,并在 Si
豫ICP备13014461号-1 联系QQ:1102194243