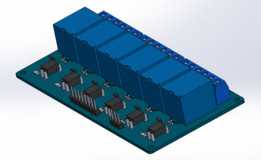
我制作这个模型是因为我受到了这里其他模型的启发,但我注意到没有人上传过我这款六通道版本。产
浏览4次 大小未知
六角螺母,标准M8
Arduino Mega2560
浏览7次 大小未知
伺服电机是一种专门用于精确控制位置、速度和扭矩的电机。伺服电机常用于对精度和重复性要求较高
65mm 26.5mm 5mm#FIBO_FARB11
型号:Fanuc R-2000iC165F 有效载荷:165 kg 臂展:2,565 mm 轴数:六轴机器人 重复精度:±0.1
浏览5次 大小未知
变形金刚幻影设计。灵感源自G1动画和BB电影。
行程长度:5mm孔径:5mm
添加了其他 SolidWorks 模型中缺失的半径,这有关系吗?不知道。公式来自这里:https://electric
浏览8次 大小未知
机器人夹爪是一种末端执行器,它是位于机械臂末端的装置,用于与环境交互。夹爪的主要功能是抓
这是站立式(MAN)模型。该模型可用于大型集会,尤其适用于仅需展示给定区域整体可达性和人员移
如果能用SolidWorks 2018实现电机和过载电机,请给我点个赞。
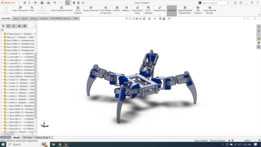
四足蜘蛛
浏览6次 大小未知
一款四自由度机械臂,专为工业或教育环境中的精确拾
使用 SolidWorks 制作微型伺服电机的 3D 建模、装配和动画,并在 Visualize 中渲染。特别感谢 Yo
浏览9次 大小未知
微电机pololu支架
浏览3次 大小未知
初始用途:为 SCUTTLE 机器人添加此组件,用于安装 76 毫米高的轮子,并将其连接到 3030 型材上
16毫米瞬时按钮 红色
受狗启发而设计的四足机器人。3D打印资源可在此处找到:https://topmate.io/pranavj
此模型为三自由度 (3-DOF) Stewart 平台设计。运动由 MG90S 微型伺服电机和齿轮机构实现。并联机
这是为库卡机器人手臂设计的夹爪。您可以用3D打印机打
直线导轨参数化零件设计。型号(HIWIN MGN15H)
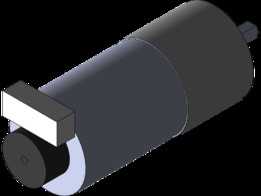
宽度:26毫米;直径:68毫米(无胎面),70毫米(有胎面);轴径:5.4毫米
型号:通用简易伺服电机 Nema 34 电机机架尺寸:86.0mm 电机长度:103.0mm 轴径:14.0mm (0.551i
改装后的8英寸脚轮,可与连接器配合使用
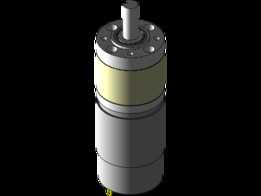
这是行星齿轮电机 RS 775 的 SolidWorks 模型
麦克纳姆轮是一种用于机器人领域的无轮胎轮,它使机器人能够在不改变方向的情况下向任意方向移动
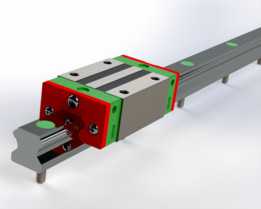
HIWIN HGL15CA 滑座和HIWIN HGR15R 导轨
豫ICP备13014461号-1 联系QQ:1102194243