~
浏览7次 大小未知
气动抓取装置
浏览5次 大小未知
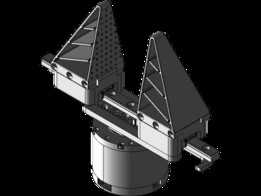
该传动系统于2022年设计,但从未制造。它通过升降中央牵引轮在麦克纳姆轮驱动和六轮驱动之间切换
浏览8次 大小未知
FeeTech SM45BL伺服电机。连接器尺寸为近似值。其他尺寸取自FeeTech文档,未经验证。
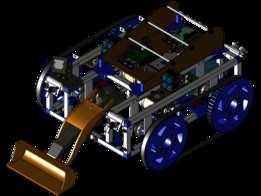
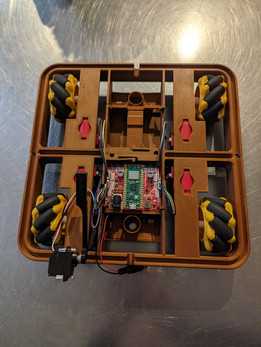
这是我的侦察车项目的工作设计。更多信息请访问:https://github.com/dgitz/icarus_rover_v2/wik
浏览6次 大小未知
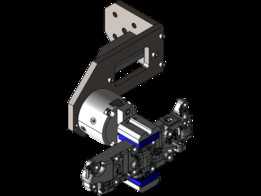
使用机械臂抓取器拾取球
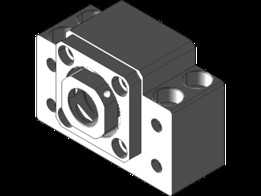
Mancal - 轴承 - BK15
浏览4次 大小未知
关节模组:DM-J4310-2EC批发了关节模组的“前端盖”和“头部盖”。有刚性夹爪和鳍条效应夹爪,两
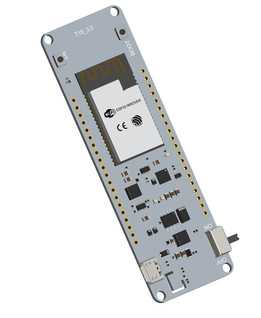
这是一款带有 ESP WROVER(4MB Flash 和 8MB PSRAM)以及锂离子电池电路(具有过充和欠充保护)
机器人
RF-300FA-12350直流电机三维模型;该模型基于实际电机尺寸和数据手册制作,部分尺寸无法测量。文
这些3D文件已用于我的项目/设计和演示中。请将这些3D文件用于您的项目。请点赞并关注我的账号,
浏览9次 大小未知
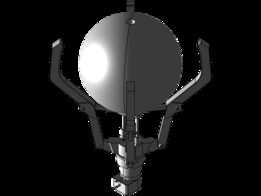
受特斯拉Optimus启发,对未来机器人进行粗略的概念设计。使用Shapr3D创建。
浏览13次 大小未知
OpenMV Cam 是一款小巧、低功耗的微控制器板,可让您轻松地在现实世界中实现基于机器视觉的应用
麦克纳姆轮驱动 XRP(体验式机器人平台 https://experientialrobotics.org/)机器人底盘。该底盘
越南制造,Quoc Cuong 84776008576
目的地:深空》最终竞赛设计方案。特点:西海岸(坦克式)驱动系统,配备6个小型CIM;两级连续升
Bluebird 标准伺服 BMS-630MG 模拟伺服 Getriebe-材质: Metall Steck系统: JR
55x30x13 6006Z轴承三维模型
AIR160S4 电机仅为三维模型,提供计算和设计指导。功率:15 kWt
多机器人规则!Loíde,Debi的兄弟,是我多机器人项目的一部分。在巴西,我们没有关于多机器人项
ONPIRA TDY-12 型齿轮减速电机的简化模型。
用于夹持汽水罐的夹具设计。备注:所有螺母和螺栓均为M3规格,公差0.2mm
这是一个甲虫模型项目,配备水平武器。其运动方式采用了一种新方法,利用无刷电机通过轮毂将能量
蝙蝠侠的自行车(更不用说,他是克里斯蒂安·贝尔)
浏览12次 大小未知
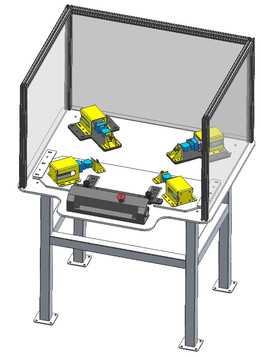
此设计是基于 MK5 Recreator 的 PET 瓶回收机的定制版本,最初可在以下网址获取: https://www.p
浏览10次 大小未知
这套漫游车移动系统是我在东北大学毕业设计项目的一部分,由我和我的毕业设计团队成员Rithin Tir
第五周我感染了新冠,所以我重新设计了3494队的快速反应机器人,增加了转向功能和全新的系统。我
浏览3次 大小未知
豫ICP备13014461号-1 联系QQ:1102194243


![模块化 | [B-01-HRA] 运输机器人 2020 V.1](https://static.3dmox.com/picture/pt260/2026/2026011706552227524.jpg)






![FRC 1160最终设计:Galac[Ti]c](https://static.3dmox.com/picture/pt260/2026/2026011706585227654.jpg)






![[POD] PET瓶长丝回收器](https://static.3dmox.com/picture/pt260/2026/2026011707010727796.jpg)

