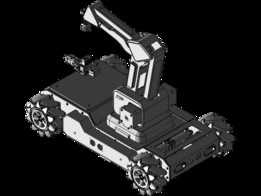
13603 的机器人,用于明尼苏达州比赛fusion 360链接:https://a360.co/3LTWkhh
浏览9次 大小未知
这是适用于 OpenMV Cam 的 M12 镜头卡口替换件。
浏览5次 大小未知
这是一个使用 Fusion 360 设计的六自由度 (DOF) 机械臂。该机械臂兼具高精度和高灵活性,适用于
浏览14次 大小未知
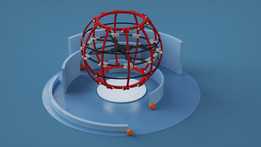
这是无人机足球的保护框。
浏览10次 大小未知
fusion 360 链接: https://a360.co/3CDIMkz
凯特林大学在30小时内为终极目标打造了机器人。最终的机器人与CAD模型在许多方面有所不同,为了
一套完整的夹具组件,包括线性导轨、滑块及相关连接件(螺栓、垫片等)
基于Fusion 360设计的爬楼梯清洁机器人是一款先进的机器人解决方案,旨在确保高效清洁不同楼层,
Полходит к Вилка-фланец 2101-2201023。
浏览4次 大小未知
Apex Robotics 5803 的 2018 年 FRC 机器人,参加 FIRST Power Up 比赛
迈尔制动器,通常用于机器人(cobot),几乎零背隙,专为大型空心轴设计。 RSV50、60、80这三种
浏览6次 大小未知
负载轮或支撑轮用于分配机器人在轨道和地面上的负载。此外,轮子还保证了坦克履带的对准。项目中
请关注 Repeat Robotics 和 Just Cuz Robotics。他们复制了一款名为 Prince 的机器人,这是一款
一种编码器模块,能够利用磁场非常精确地测量例如某个轴的角度。为了使传感器正常工作,必须将径
小型螺旋桨设计方法:三维草图绘制及样条曲线放样
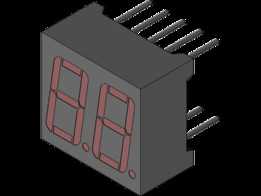
只有外形和引脚是准确的。不是数字引导
用VEX零件制作的《霹雳五号》中的强尼5号。
浏览3次 大小未知
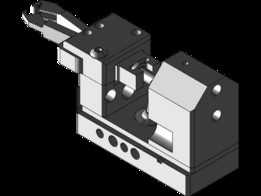
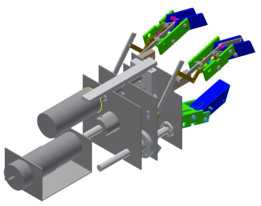
这是用于夹持线材的夹具。Z轴可通过螺丝调节。这是一款气动夹具。
偏航角为左右各120度,俯仰角为前60度,后45度。文件正在打印和测试中。
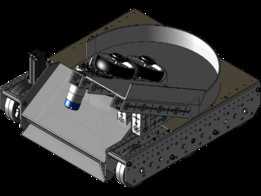
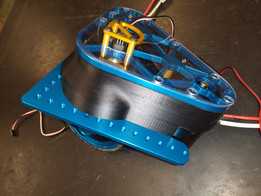
用于摄影测量的转盘和相机支架。专为树莓派 Zero 和树莓派相机/Arducam 设计。如果手机不太重,
浏览8次 大小未知
这款旧款适配器专为安装在带有 12mm 六角轮毂的车轮上而设计。方便连接变速箱和电机(6mm 直径轴
自动驾驶汽车
“红心皇后”Mk. 2.2 代表南加州大学高级机器人战斗队参加了 2024 年萨克拉门托机器人大战 (Sacr
这些机械臂的设计是我在大学二年级、三年级和四年级期间参与的多个项目中完成的。它们的设计目的
这些卡扣式盖板专为 FRC 机器人竞赛的 SDS Mk4i 全向轮模块设计。它们可容纳一个 12 伏、40 毫米
一种联轴器或接头,能够以任意选定的角度通过轴传递旋转动力。
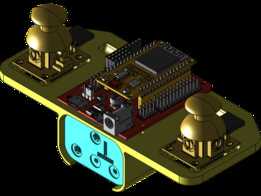
这是一个非常基础的 Wi-Fi 游戏手柄,使用基于 ESP32 扩展板的普通电阻式摇杆。它在我的项目中与
浏览7次 大小未知
Otto机器人DIY项目中使用的触摸传感器
豫ICP备13014461号-1 联系QQ:1102194243