抓取器 2
浏览4次 大小未知
使用 Fusion 360 设计并建模了一台全尺寸涡轮喷气发动机,该发动机由 52 个定制零件组成。这些零
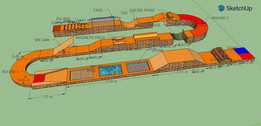
这是为 TechnoPlanet 设计的示例曲目。
浏览5次 大小未知
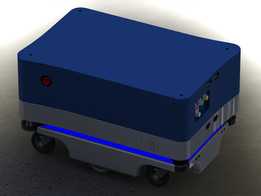
一辆简单的汽车在2018年UIT汽车竞赛嵌入式编程比赛中获得二等奖
浏览3次 大小未知
斗篷女人雕像 pelerinli-kad?n-heykeli
浏览11次 大小未知
大家好,我叫奥黛丽·克拉克,今年11岁,是加州的一名五年级学生。我参加这次比赛是因为我长大后
eri?ilmez yerlerdeki nesneleri uzaktan alma veya b?rakma - 在无法到达的位置远程拾取或放下
浏览8次 大小未知
软握臂模具。YouTube频道上有模具制作视频教程。教程:https://youtu.be/Eo3y-UqJ100Delta X Rob
浏览6次 大小未知
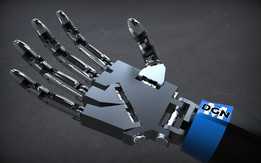
这款结构简单的类人手利用多个电机,通过一根长肌腱连接手指,实现手的闭合和放松,并使手指能够
浏览9次 大小未知
基于 Atmega328 的 Arduino UNO
浏览7次 大小未知
产品详情产品尺寸:宽 = 670 毫米,长 = 850 毫米,高 = 712 毫米。多边形:432946,顶点:56608
浏览10次 大小未知
N20 电机是一种微型金属齿轮电机。
L298N步进电机控制器可用于机器人系统原型制作、机器人技术应用或艺术模型创作
产品详情产品尺寸:请参见附件多边形:0.02M 顶点:0.04M 文件单位:毫米软件:Inventor 20213D
浏览16次 大小未知
产品详情产品尺寸:请参见附件多边形:0.1M 顶点:0.2M 文件单位:毫米软件:Inventor 20213D CA
浏览12次 大小未知
基于ABB IRB 4600机器人(20公斤,2.5米)和ABB IRBP A750 D1000 H900单元的矩形管道焊接机器人
用于确定角度的 MPU6050 模块的 3D 模型。
产品详情产品尺寸:请参见附件多边形:495352顶点:682546文件单位:毫米软件:Solidworks 20213
产品详情产品尺寸:请参见附件多边形:165128顶点:240480文件单位:毫米软件:Solidworks 20213
产品详情产品尺寸:宽 = 585 毫米,长 = 898 毫米,高 = 537 毫米。多边形:598649;顶点:80083
采用T8导螺杆导轨和滑车,由5mm厚铁板切割而成,主轴赫兹。更多信息请点击以下链接:https://wa.
这款用 SolidWorks 设计的 OmniWheel 是一款特殊的轮子,其圆周上装有多个滚轮。这些滚轮使轮子
我们把它用在了 KRIT Mini Sumo 机器人上。www.facebook.com/kthrobotWon 在 www.RobotSM.se 机
9伏电池
产品详情产品尺寸:请参见附件多边形:133048顶点:192266文件单位:毫米软件:Solidworks 20213
浏览15次 大小未知
机械臂是一种可编程的机械装置,旨在模拟人臂的运动和功能。它由多个关节、执行器和连杆组成,使
面向人类和机器人的开源机械手。本项目采用 CERN 开源硬件许可证 (CERN-OHL-S) 授权。GitHub:ht
这款轮子兼容博牌电机、约翰逊金属齿轮电机等直流电机。
豫ICP备13014461号-1 联系QQ:1102194243