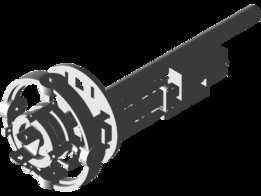
为了延续自平衡机器人系列,今天我将介绍一个完全不同的版本。这个机器人是我最近一个项目的一部
浏览11次 大小未知
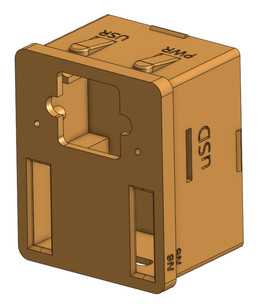
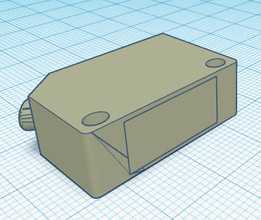
这是 OpenMV Cam 的官方 3D 打印外壳!这款外壳完美贴合您的 OpenMV Cam,同时露出所有接口,并
浏览4次 大小未知
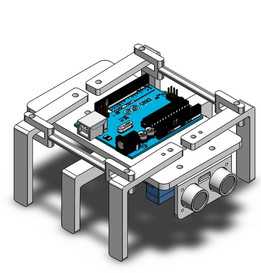
这款机器人是哥伦比亚大学在纽约市设计并制造的,作为一项学术项目。如果您需要完整的组装和编程
浏览5次 大小未知
适用于 RexRoth-Bosh 45x45mm Delta 3D 打印机的组装组件。(打印头)(磁轴支撑)双轴 14mm 支
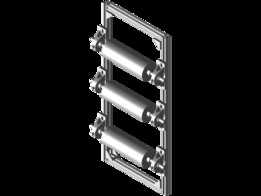
这是制作自动传送带的DIY项目
电话线设计,使用 CATIA 完成
浏览3次 大小未知
我的微型无人机设计
机器人麦克纳姆轮
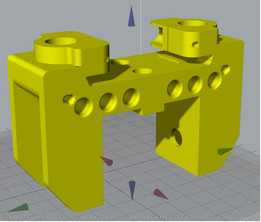
这是一个利用线性致动器实现大范围旋转运动的机械手腕。项目在我还没来得及分配材料和“完成”模
适用于将 CUI AMT102-V 编码器安装到 West Coast Products DS 齿轮箱上的编码器安装座。
认识一下尼莫!尼莫是一个重一磅的塑料机器人,原型是战斗机器人“恶意”(Malice),但它对新手
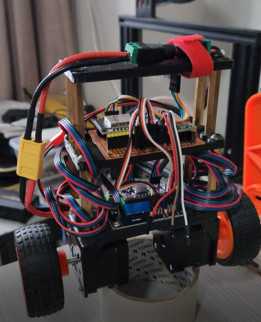
使用步进电机的3D打印平衡机器人。该机器人基于ESP32平台运行。步进电机难以控制,建议使用直流
浏览9次 大小未知
如何制作步进电机支架以及如何用 CAD 软件设计,您可以访问以下链接查看:https://www.nerd-corn
浏览12次 大小未知
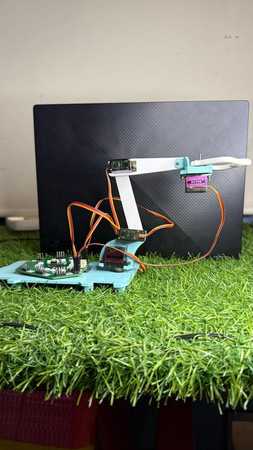
这款DIY机械臂是一个简单有趣的入门项目,适合想要学习机器人和机械原理的初学者。它包含几个易
浏览6次 大小未知
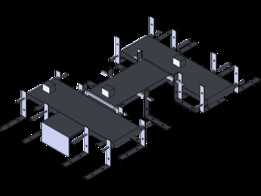
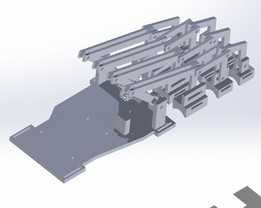
使用SolidWorks建模,设计并构建了一条完全自主的装配线和制造单元,该单元与IRB 2600工业机器人
浏览8次 大小未知
这是我为机器人团队设计的可打印塑料齿轮。齿轮半径约为 32 毫米,高度为 15 毫米。每个齿的宽度
适用于英特尔 RealSense D405 和 D415 的安装支架。改编自:PickNik Robotics 的 MoveIt Studio
这款 3D 打印模型可让您将 OpenMV Cam 安装到三脚架的 1/4-20 螺丝接口上。使用此板时,请搭配 M
FS-80NK 漫射红外传感器
轮子
浏览10次 大小未知
这是 Mercury 1089 团队为 2018 年 First Power Up 机器人设计的最终 CAD 模型。提供 STL 和 STE
浏览7次 大小未知
一种设计用于与 Tetrix 组件配合使用的线轴,适用于需要拉绳的线性滑轨升降机。
配备两个伺服电机的六角机器人
面向人类和机器人的开源机械手。本项目采用欧洲核子研究中心开源硬件许可证 (CERN-OHL-S) 授权。
本项目旨在设计一款低成本(2250 孟加拉塔卡)的 3D 打印手部外骨骼,该外骨骼完全使用 SolidWor
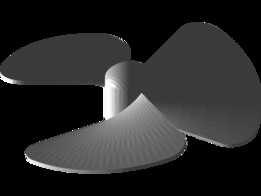
一款专为遥控船设计的船用螺旋桨模型。
斋月灯笼 2 斋戒月灯笼 2 SolidWorks youtube : https://youtube.com/@ahmedzayed14facebook
Humanoide V2
豫ICP备13014461号-1 联系QQ:1102194243